Authors: Andrew Georgioff, Ritik Mishra
Introduction
Today, our Falcon 500s came in the mail today! We were going to test it, but were unable to due to the state of Sgt. Sammy.
Also, here’s a funny story. Today, we were trying to get the Spark MAX’s to drive the NEO’s using just the driver station (no RoboRIO or any of that nonsense). It took a while, which should be expected since any time something is supposed to be “plug-and-play,” Talon Robotics seems to always screw it up. Essentially, here, the meaning of the phrase is closer to “plug it in and play outside for 8 hours because it won’t work until the freshman breathes on it just right.” Anyway, we eventually got it to work after about 30 minutes. We confirmed that a NEO dropped on the floor yesterday is still operational, and that the other NEO scavenged off of Sgt. Sammy still works. But we accidentally plugged the wires in wrong (i.e not red to red, black to black, white to white). This likely caused the motor to start releasing some magic smoke! Fortunately, we noticed quickly enough so that we could unplug the motor and stop all of the magic smoke from coming out.
Long story short, treat your motors nicely. Magic smoke smells bad.
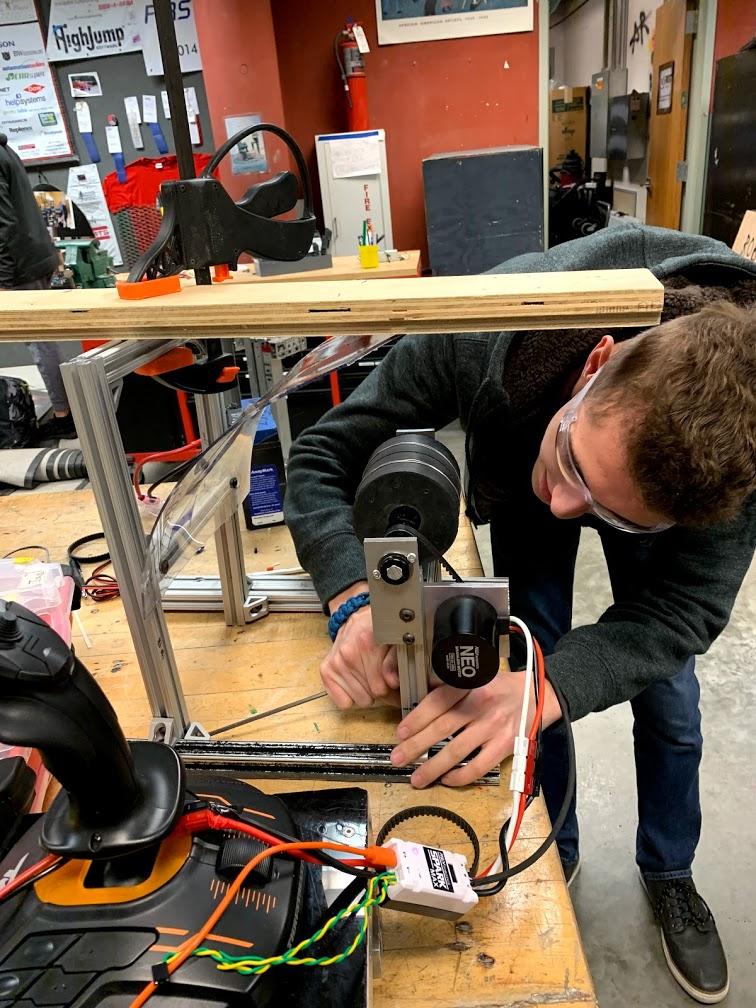
Single Flywheel
Today, breakthrough progress was made on the single flywheel prototype! The chassis was redesigned to make it easier to test compression on the ball. We also finished
- Manufacturing the bearing plates that hold the flywheel
- Scavenging the old Fairlane RR-754-35-RP Neoprene wheels from an old 2017 offseason project
- Manufacturing a mounting plate for the NEO brushless motor
- Note: We chose to use a NEO instead of a Falcon or CIM because it is easy to set the NEO to a specific RPM without having to wire up the whole robot
- Addding a quick, janky test hood
We were able to make a couple of test shots before the 3D printed belt pulley wore out and no longer was a tight fit on the NEO.
Next steps include:
- Putting more than 5 minutes of effort into a real hood
- Fun fact: When bending materials, the shape they form can be represented by a cubic polynomial spline. It is impossible to perfectly approximate a circular arc with a cubic spline, but you can get quite close!
- Replacing the NEO’s belt pulley or installing a machine key in it
- Seeing how RPM drops as the ball is shot through the flywheel
2nd Driver Station
Our current driver station is good, but it is heavy and can be tough to transport. Additionally, Disco and Midnight have been reprogrammed to require only 2 joysticks, making all 3 unnecessary. As a result, we decided to build a second, smaller driver station for use for demos. The frame, which is made of 80/20, was found laying around in the room near the end of the offseason. Today a piece of plastic harvested from an old HAB platform was cut so it would fit on top of the driver station. This way, we can velcro joysticks and a second driver station laptop to the top, much emulating the structure of the primary driver station.
Sgt Sammy’s Makeover: Encoders Complete!
Today, we finally got the second encoder on Sgt. Sammy! The new one lights up orange instead of green because it is too close to the magnet. It should be easy to pull it back a little bit.
However, by removing the Spark MAX’s, moving the roboRIO, and removing all the pneumatics, we have had to unplug the CANbus from various components. We spent some time reconnecting the CANbus back together, but we were not able to get any of the motor controllers to show up in the Phoenix Tuner, which allows us to observe the status of all of the Talon SRX’s (and falcons, once they go on the bot).


At the top and bottom of this picture, you can see the encoders (the robot is turned off, so their lights are turned off too). The roboRIO is in the middle, and the navX is under the blue rectangle (it’s a protective 3D printed cover) on the RIO.