Authors: Andrew Georgioff, Ritik Mishra
Double Flywheel Testing
We continued testing of the double flywheel today, this time with different angles. During some early testing, we found that the shafts extending past the bearings on both sides were causing balance issues. We cut the shaft to the needed length and it increased stability upon further tests. We initially tested 30°, but it was too high to hit the higher goal from farther away. After this, we decreased it all the way to 12° which made it hit way too low on most distances we tested. We then increased it to 23° which seemed to be a better middle.
We also made a new motor mounting plate (copied the design from the single flywheel) to replace the old, janky mounting solution.
One issue that we had today pertained to flywheel balance. As it turns out, the Colson wheels are not perfectly circular. This is not some kind of technicality where nothing is exactly precision; the distance to the axis of rotation varies by a visibly large amount. This caused an insane amount of vibration since the mass was moving so fast in/out relative to the axis of rotation (fun fact: this is how some vibration motors work!). To reduce the vibration, we had to figure out where the high spots were on the wheel and then rotate the wheels on the hex shaft in order to “dynamically balance” the flywheel. Unlike static balancing, which is when the flywheel is able to “rest” anywhere (i.e it won’t “fall down” to a preferred spot), dynamic balancing means that the wheel is balanced when in motion. Flywheel balancing is something people do for their cars, so you will get ample resources on the internet and possibly even from mentors if you ask/Google it. A seasoned mentor proposed some ways to make a flywheel balancer (a small part that goes on the flywheel shaft that has adjustable/movable weights that lets you balance the flywheel), although we did not make one (note: if you do make one, it should have at least 3 degrees of freedom).
Anyways, we got the flywheel to stop wandering around the floor (it still vibrates a little though) by making the high spots on the wheels point in opposite directions.
We also redesigned it so that it was just big enough for the ball, allowing us to more consistently feed it in.

Single Flywheel with adjustable hood
The CAD of the hood has been completed and sent to Stratasys. Once we receive the 3d printed hood we are planning to test it.

The design has 1.25” of compression against the 4” neoprene flywheel, and an ejection angle of 25 degrees down from the vertical.
Fourbar OBA
After the 2-inch mecanum wheels failed yesterday (due to improper assembly), we have been testing different wheel combinations. We started to swap to 4-inch mecanum wheels yesterday, though today we finished adding them and added a green compliance wheel in the middle.

Above: The new rotary OBA
Side note on those 2 wheel mecanums: We are currently under the impression that we need to drill out some of the holes to a #56 size in order to support the plastic thread-forming screws. More testing will be done either tomorrow or Tuesday.
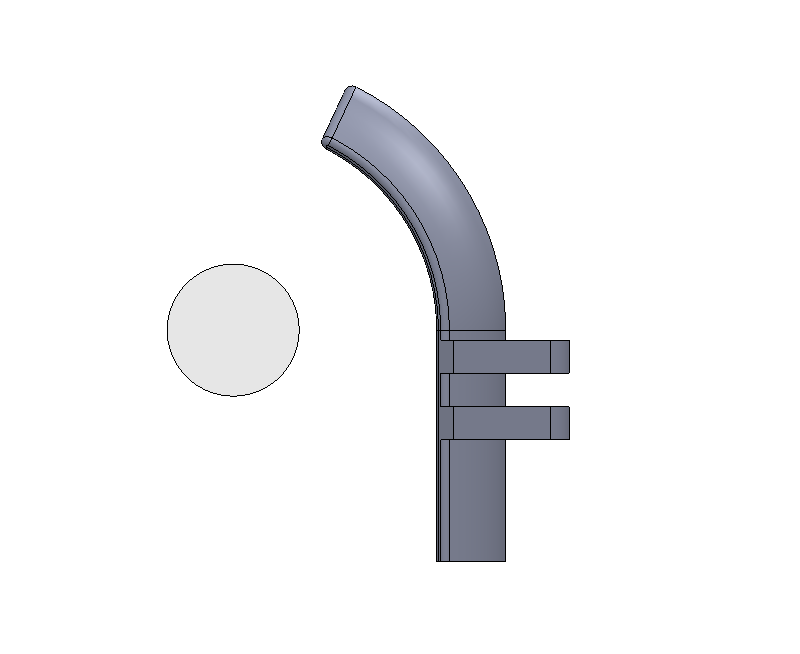
L Tunnel V2
Today, we started to design the 2nd version of the previously successful L tunnel ball management system.

We have made one of the 3 boxes, and are well on our way towards making the other two.
A problem that we experienced related to the hole spacing of raptor frame. When the pieces were cut, not all of them had the middle 1/2” hole in quite the right spot, so it was difficult to drill the bearing hole.
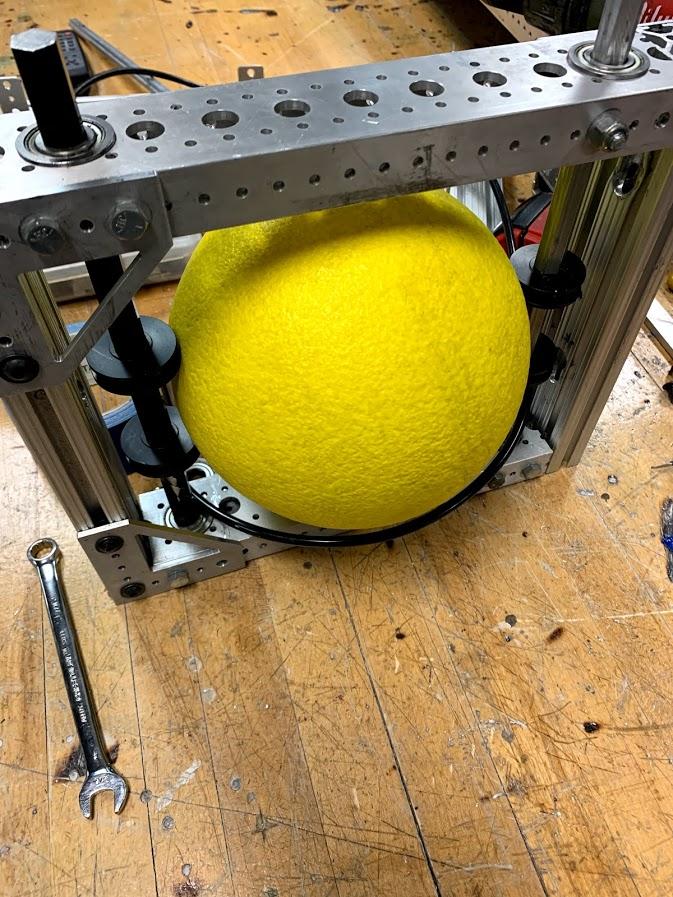
One potential problem is that the compression varies up to an inch as the ball approaches the bend. This might be mitigated by the fact that the ball is round, and that “1 inch of compression” in the top view may not be 1 inch in real life, since the pulleys will be touching the ball at its “corners” instead of its side.
Field Elements

The power port was made today, but it unfortunately could not be delivered to the robotics room before it closed.
Quote of the day: “Nobody would be crazy enough to build a boat out of glass …. crashclankclankclank. . . BUT I WOULD!” — Phil Swift, Celebrity