Authors: Ritik Mishra, Andrew Georgioff
Drivetrain Falcon Shaft
Yesterday, we noticed that one of our Falcons had a loose shaft. We did not have enough time to remove it from the robot, so we just ran with it and hoped that it wouldn’t cause too much damage. The Falcon shafts are able to come loose because (after disassembling the motor), one can remove them completely by undoing 5 screws that don’t have any Loctite on them.
Today, we began fixing the Falcon. Now that the robot is mostly assembled, we had to cut several zip-ties and remove one of the hopper bearing spoons in order to get the motor out. After a lot of work (the screw heads were difficult to access), we finally were able to get the motor out, until we hit another snag: the pinion needs to come off of the motor, but due to manufacturing errors on the pinions, it was difficult to do so. We eventually persuaded the gear puller (which is for 4 inch gears?) into pulling off our 11t pinion (which is slightly larger than .5 inches). Afterwards, we followed the instructions on the VexPro website (look under Docs and Downloads for the Falcon 500 replacement shafts, NOT the actual Falcon 500’s) and proceeded to disassemble the Falcon 500. At this point, we were finally able to tighten the 5 screws that hold the shaft to the motor.

Above: A picture of the disassembled falcon, showing the 5 screws holding the shaft to the motor).
Once we reassembled the motor (now with a firm shaft), we decided to apply the recommended fix for the press fit pinion (it is not supposed to be a press fit). (source for solution).
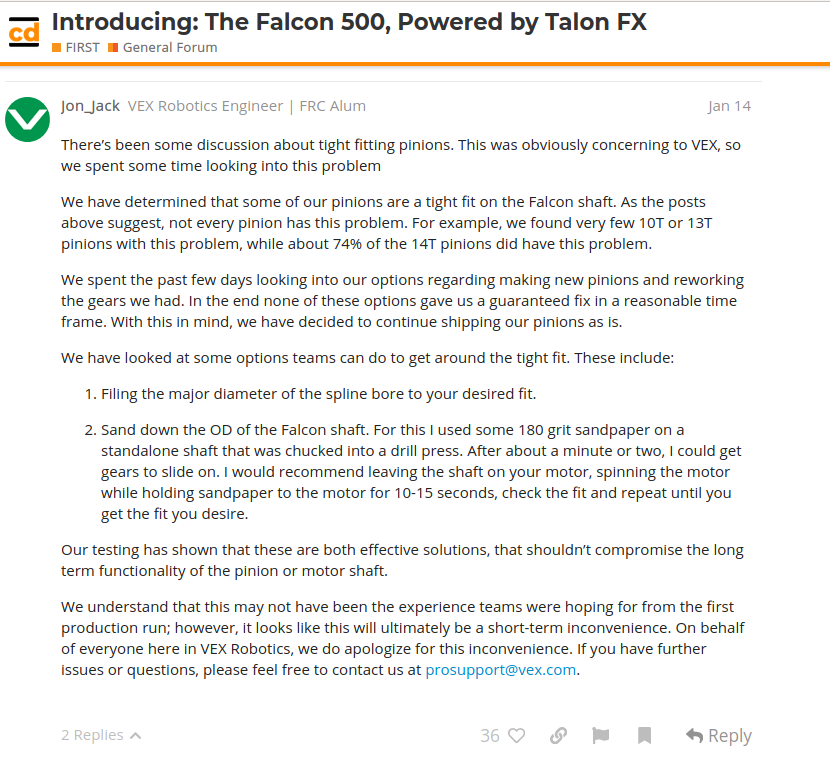
We were able to reduce the amount of force required to push the pinion on, but because we were using ~600 grit ScotchBrite instead of 180 grit sandpaper, we gave up after 10 minutes of sanding, checking the fit, sanding again, realizing the pinion was misplaced, etc.
Anyways, long story short, the drivetrain is fixed now.
Active intake
At Week 0, we barbequed the magic smoke out of a few motors. During intake testing today (in which we tested the effectiveness of the intake without the top roller; it was quite effective), we saw the active intake motor release some more magic smoke. After looking on Chief Delphi, we found that another team had been having the same problem as us. The solution (as provided by REV employees) was to set the Smart Current Limit on the Spark MAX. The default current limit is 80 amps. Although this is only a tad high for the big NEO, it blows the socks off of the baby NEO, causing fatal damage. After setting the Smart Current Limit on the active intake Spark MAX to a much more reasonable value of 26 amps, we loaded the baby NEO for ~30 seconds and found that it was not that warm.
Other Notes
- Comp bot frame is done being anodized, and will be retrieved from EcoFinishing’s facility in Fridley tomorrow.
- We found a code issue where the hopper would only run forwards if the shooter was on. Ideally, one should be able to reverse it at any time, but only feed balls if the shooter is running.
- The electronics should be given a once over to ensure that everything is connected in the way it is supposed to be. We had to cut zip ties and unplug things in our Falcon repair effort and our investigation into the smoking baby neos (smoking is only for adults smh)
Above: A picture showing off our robot with an egregious number of balls in its control.
Quote of the Day: It was disassembled because they disassembled it – Ritik Mishra, Design Lead