Authors: Ritik Mishra, Andrew Georgioff
We skipped a few blogs.
- Day 60: We packed the trailer with our stuff
- Day 61: We brought the trailer and the students to Duluth
Scouting
We used today to get a more general overview of all of the competing teams. We started this with pit scouting, where we collected information on the specifications of other teams’ robots. This data included:
- Drive train type
- Motors used
- Low bot? (able to go underneath the trench)
- Climb
- Control Panel
- Ground Intake
We also scouted a few of the practice matches. This was primarily done to familiarize team members to our scouting app, so when actual scouting is done tomorrow it will be done with (hopefully) more consistency.
Inspection
We passed inspection with flying colors
- BOM (bill of materials): legal
- The BOM is a list of all parts, their vendor, and price. There are price limits for both individual parts and the robot as a whole.
- Robot
- Weight: 124.2 lbs (out of a 125 lb limit)
- Edges: Not that sharp
- Parts: Safe
- Red bumpers: 14.1 lbs (out of a 15 lb limit)
- Blue bumpers: 14.4 lbs (out of a 15 lb limit)
Practice Matches
We were scheduled to compete in three practice matches, but thanks to the filler line (which continued to be sent to the field past the last practice match), we were able to compete in 7.
The table below shows how many balls we scored in each of our practice matches.
| outer – init line | inner – init line | outer – trench | inner – trench | misses | total scored | total shot | |
| pm7 | 14 | 3 | 0 | 0 | 1 | 17 | 18 |
| pm25 | 3 | 0 | 10 | 2 | 2 | 15 | 17 |
| pm29 | 0 | 0 | 6 | 0 | 6 | 6 | 12 |
| fl1 | 6 | 4 | 1 | 0 | 1 | 11 | 12 |
| fl2 | 6 | 2 | 4 | 1 | 3 | 13 | 16 |
| fl3 | 5 | 0 | 0 | 0 | 8 | 5 | 13 |
| fl4 | 12 | 3 | 0 | 0 | 3 | 15 | 18 |
| average | 11.7 | 15.1 |
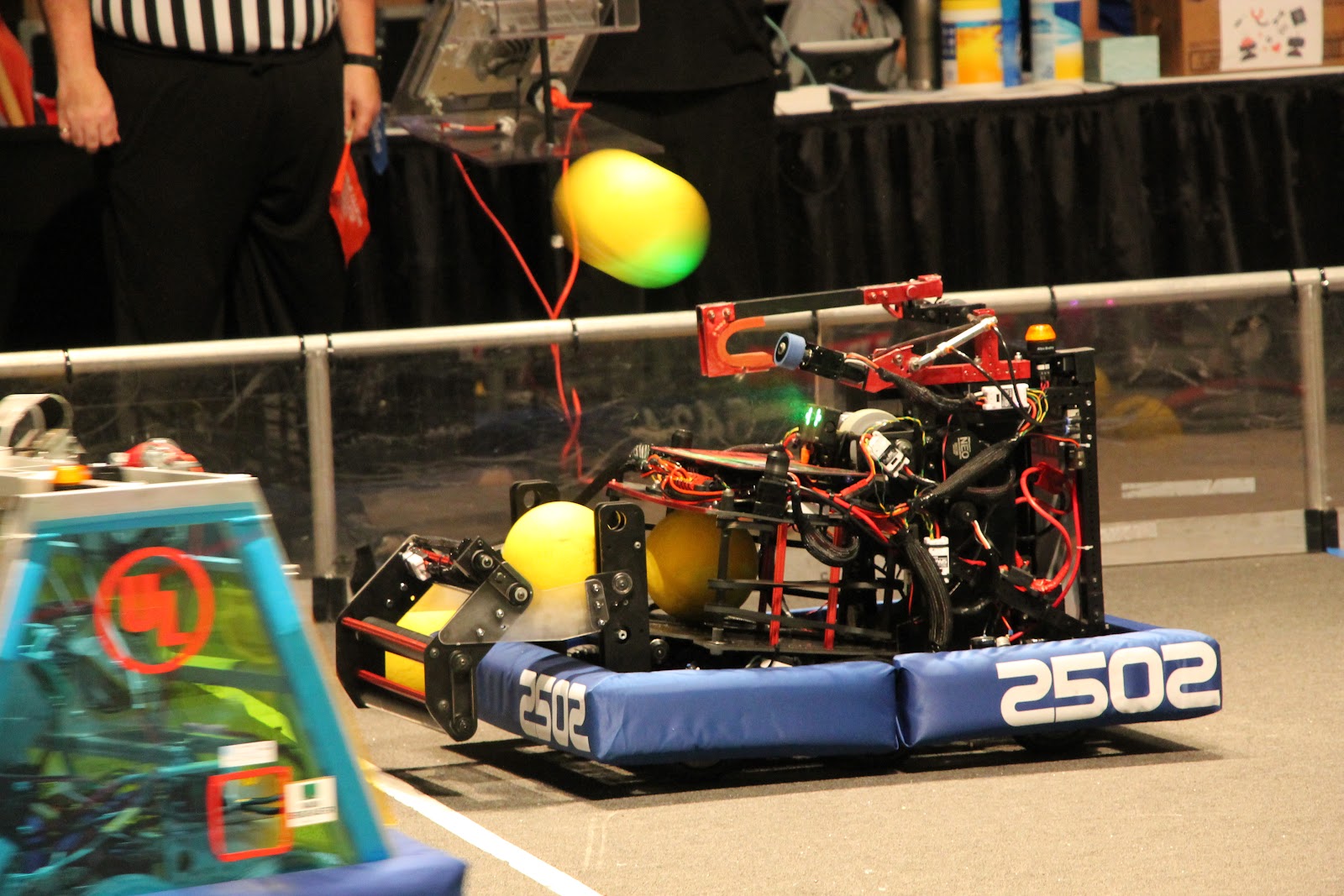
Above: Our 2020 robot, Orion, launching a power cell
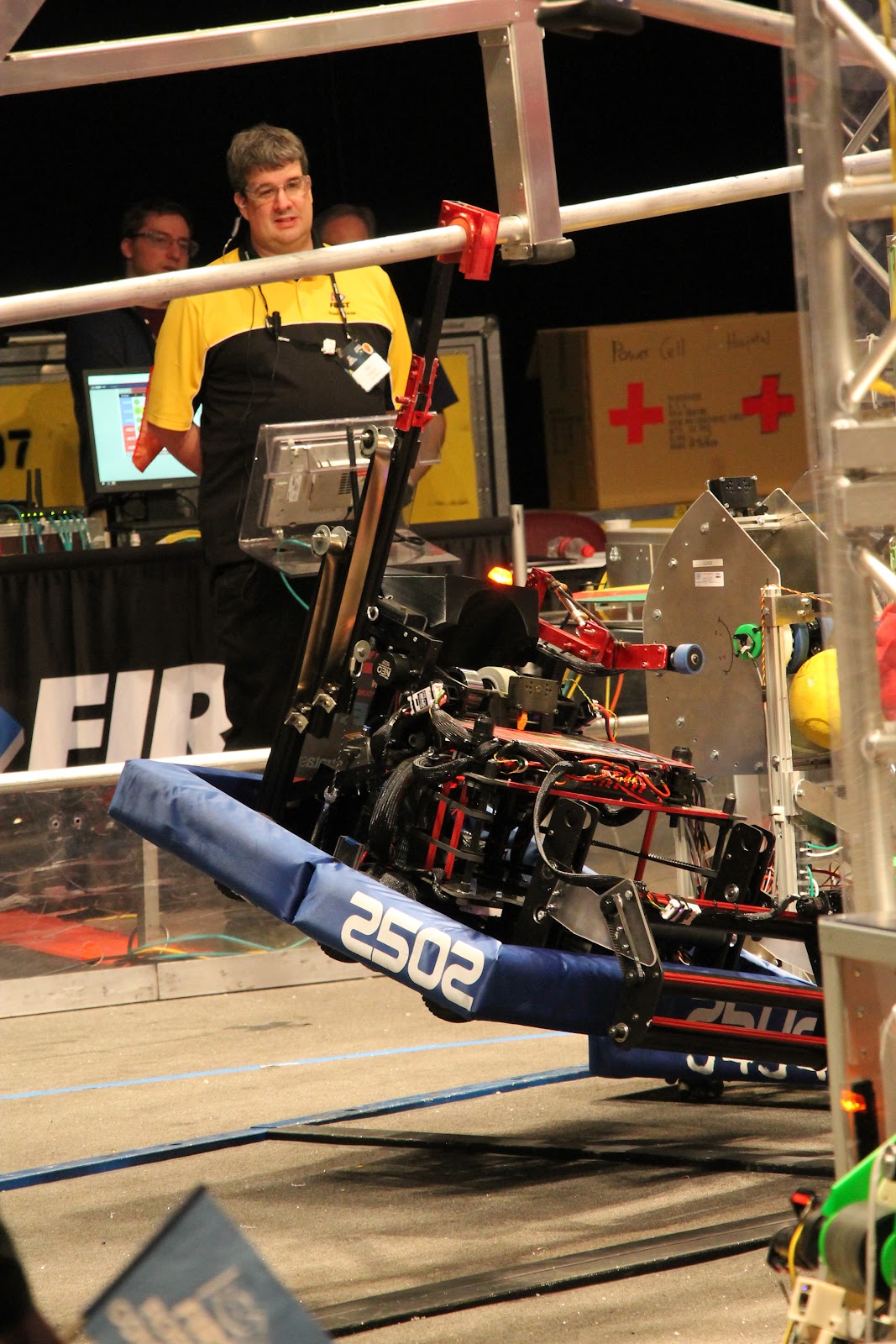
Above: Our 2020 robot, Orion, climbing on the generator switch.
Programming Issue
Today, after our first practice match, we tried to reset the climber. Unfortunately, when we pressed the “run the climber down” button, nothing happened. If we were lucky, we might maybe get one click out of the climber ratchet.
As it turned out, the ID number for the climber Talon SRX was 5. The ID number for one of the Spark MAX’s for the hopper side belts was also 5. This caused us to think that the hopper Spark MAX was stealing the CAN packets for the Talon SRX and therefore preventing the climber from moving. To fix this supposed problem, we changed the climber Talon SRX ID to 55. For this to work, we also need to change the ID in code for everything to work.
When we tried to deploy code, we got a “session is down” error from Gradle. We tried a few things (restarting the computer, killing random background apps, deploying while collected to the internet, etc), but nothing worked to fix the problem. Finally, we solicited the help of a CSA. We discovered that Gradle was trying to deploy Java (as in the thing oracle makes) to the roboRIO. One of the first things we did was reimage the roboRIO. Afterwards, we tried deploying through VSCode, which is the officially supported way to deploy code. Neither of these solutions worked to solve the problem. Finally, we decided to update our WPILib from 2019.1 to 2019.3. After we deployed (and waited 20 minutes for the new libraries to download), the code deployed. However, the climber was still broken.
We looked at the code thoroughly. We changed the code so that it would run the wheel of fortune spinner. That worked great. This finally narrowed the problem down to the code that would spin the climber.
It would only spin the climber winch if the lock was retracted.
We are dumb.

Above: 3 programmers and a very helpful CSA are pictured waiting for the WPILib to update.
Hopper Cam
Today, we added a camera so that the drivers can look inside the hopper. This helps them to know when to unjam and how many balls they have.
Above: a picture of the hopper camera
Chairman’s Presentation
The chairman’s presenters prepared and presented the chairman’s presentation today. Originally the presentation was going to be on Friday, but due to the large number of teams (27 out of 60), some presentations, including ours, were moved to Thursday. The overall theme of the presentation was transition and growth as a team through time.
Quote of the day: “What is Asus giftbox and why is it eating all of my CPU? . . . Watch out I’m deleting it now” — Isaac AJ, engineering captain