Authors: Andrew Georgioff, Pearl Jain
Today was a quieter day, with a smaller amount of people than other open room times. Due to this, plus being unable to set up the field, we decided to focus on disassembling unnecessary mechanisms and programming.
Raspberry Pi
The programming team has been hard at work. Today, we successfully wired up the Raspberry Pi. The first test we conducted was programming it to send a processed video from the camera to the driver station. This learning could help our team figure out vision for future games and help us maximize scoring.
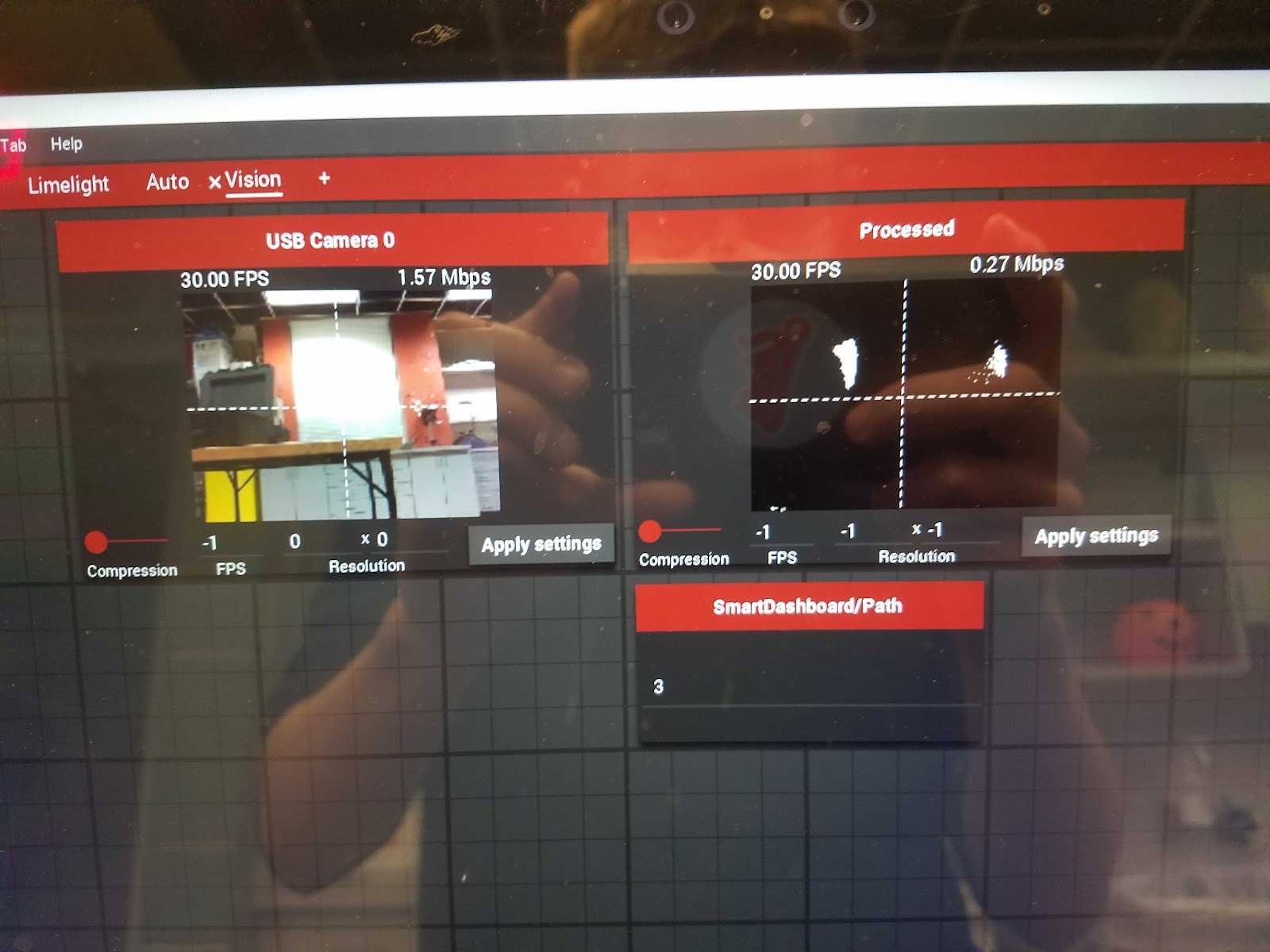
Above: One of the first tests with the Raspberry Pi shows a video from the camera on the drivers station.
Climber and Wheel of Fortune
While the climber and the wheel-of-fortune structures were important features of our robot for the 2020 game, they are no longer needed for future challenges. We removed them during open room so we could start with a relatively bare base . This will prevent complications in the future as it will be easier to add new designs without having to worry about spatial constraints. (note that we only removed the climber from the practice robot today)
Above: An image of the wheel of fortune mechanism formerly on the comp bot.

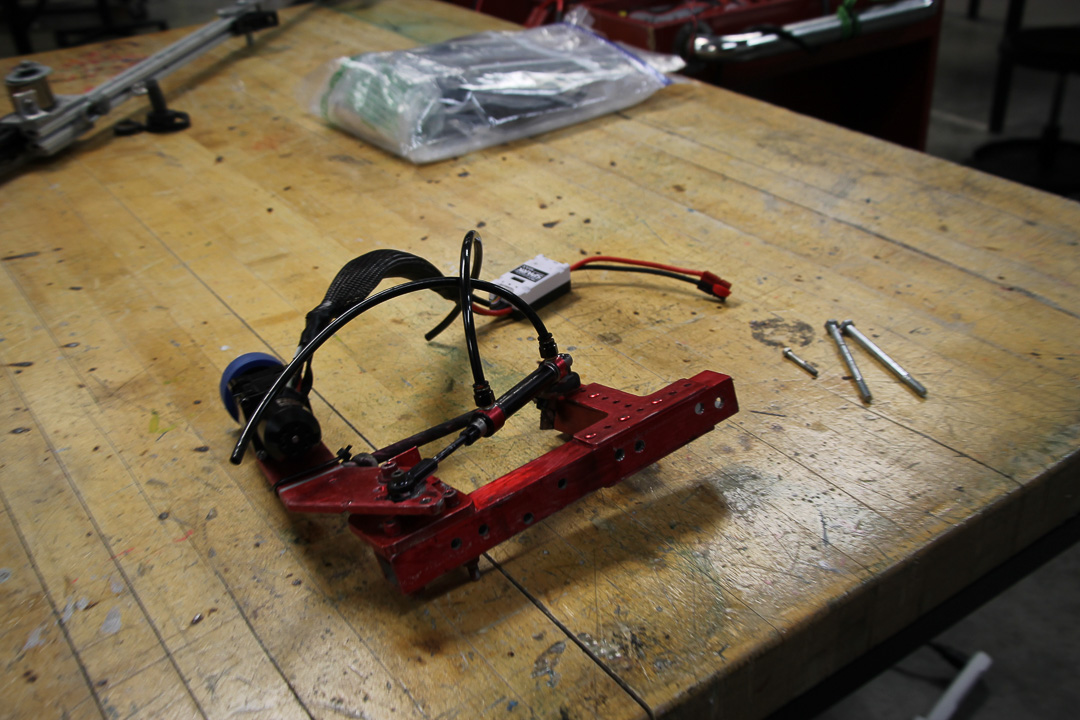
Above: An image of the climber formerly on the practice bot.
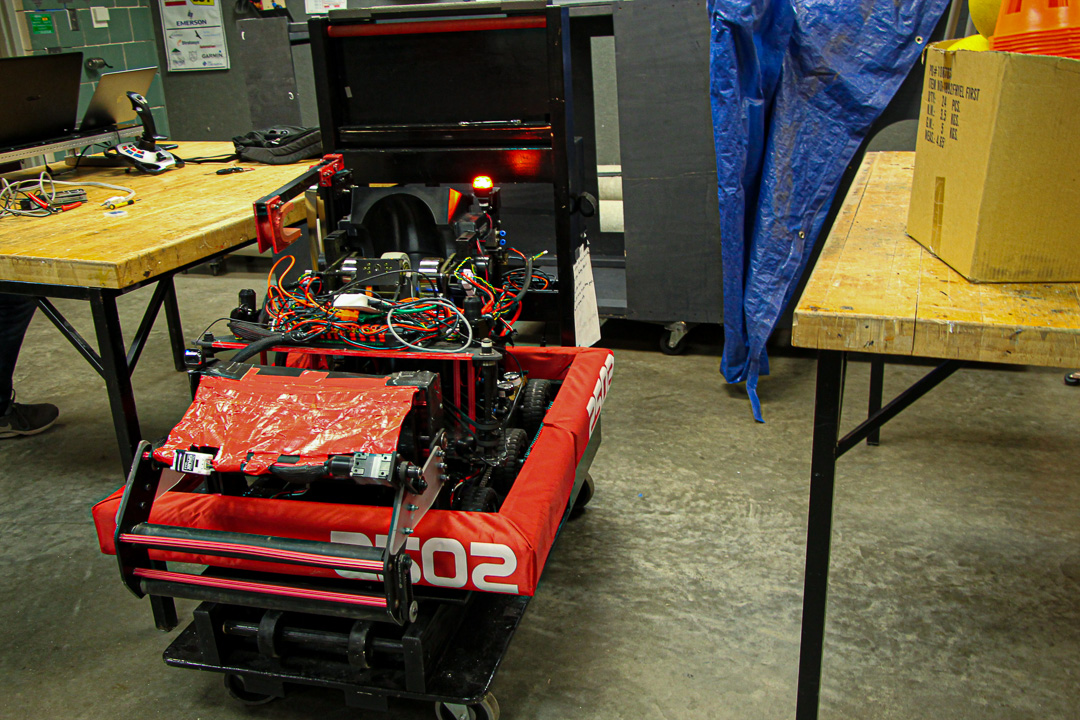
Above: The comp bot with the wheel of fortune mechanism removed.