Authors: Ritik Mishra
Waterjet Run + Hopper Assembly
Today, we got comp bot parts back from the waterjet. These include the climber hook, the climber winch plate, and the two hopper plates
Above: A short clip of the bottom hopper plate getting waterjet. You can see water bubbling out of the holes that allow it to attach to the hopper ribs.
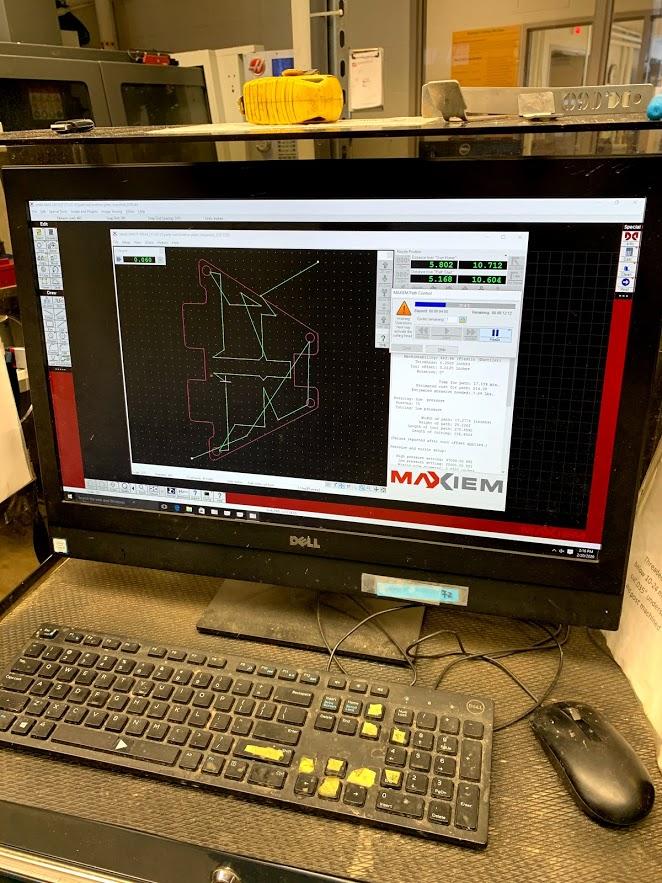
Above: A picture of the waterjet software, showing where the nozzle is going to go
The climber was deburred and prepared for welding. The bottom hopper plate was installed onto the hopper ribs, but the drivetrain has to get installed before the hopper can go onto the robot. We can’t install the drivetrain until we get spacers, speaking of which . . .
Drivetrain
Today, a crew in the shop worked on cutting all of our drivetrain spacers, drilling + tapping all of our shafts, and other necessary shop work.

Above: A picture of drivetrain spacers in a yellow tray, next to drive axles and fresh steel sprockets.
Now that we have all of the spacers, we are ready to assemble the drivetrain, if we can figure out which spacers go where. During the last 30 minutes of open room, once all of the spacers arrived, we started to try to assemble the drivetrain, but found that the spacers did not seem to match what was required based on the CAD. Hopefully, this can get figured out soon.
Code Stuffs ™
Today, now that the practice bot no longer needed mechanical/electrical work, the programmers were able to start working on autonomous routines. They empirically measured some aspects of the drivetrain (e.g width between wheels) through encoder readings and math.
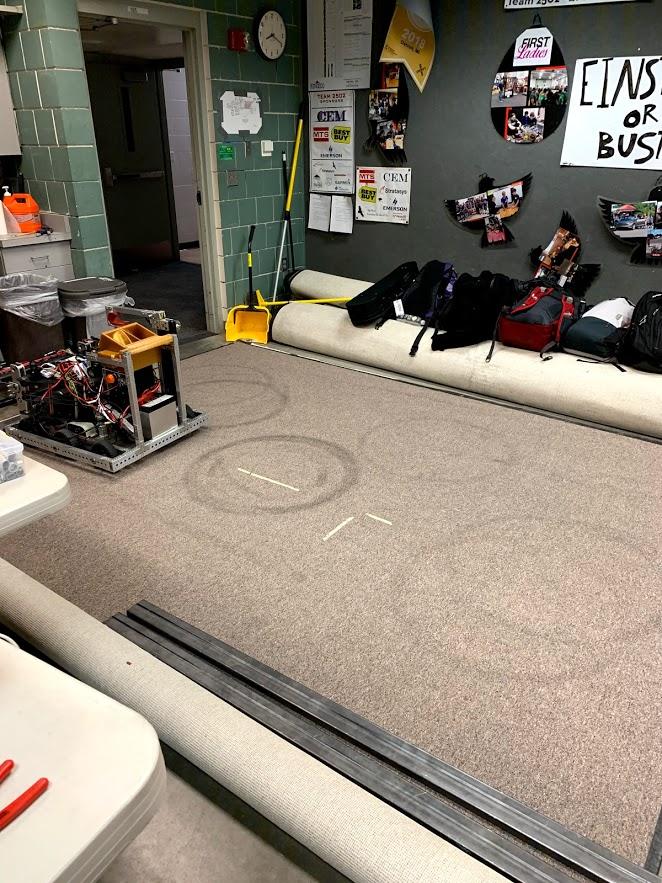
Above: A pic of the crop circles created by measuring the track width of the robot
Quote of the day:
Nicole: “How has the team changed in the past 2 years?”
Ritik: (among several other answers, like communication and mentor involvement) “Grant graduating is a big change”