Authors: Ritik Mishra
Wheel of Fortune
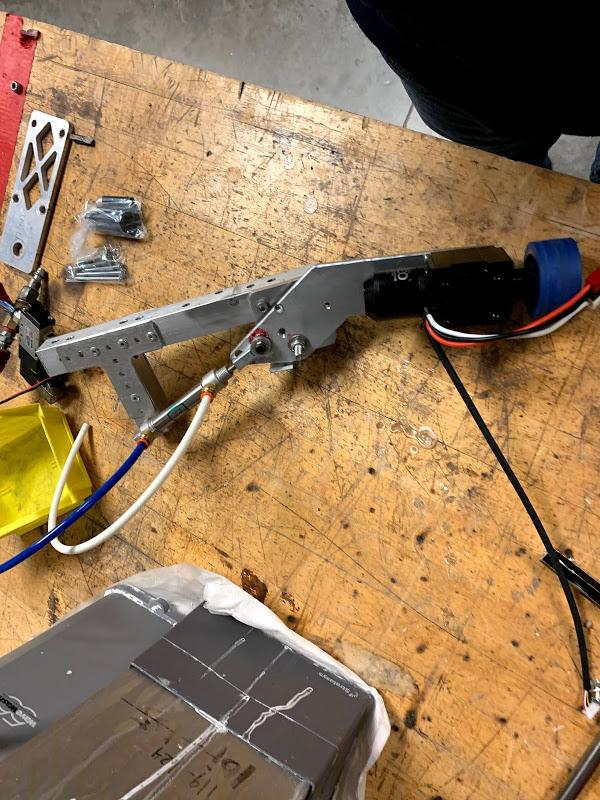
Today, breakthrough progress was made on the wheel of fortune spinner.
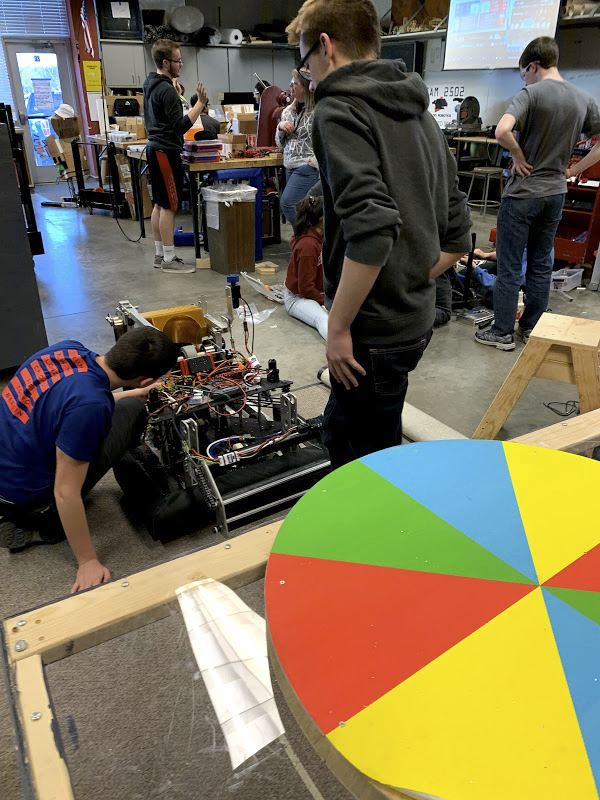
We briefly attached it to the robot in its desired location, and confirmed that it will be able to spin the wheel of fortune.
Afterwards, we took it off of the robot and installed the cylinder. The original plan was to buy a cylinder, but we found (by chance) a random cylinder laying around in the room that will likely work well enough for the job.
Comp Bot Progress
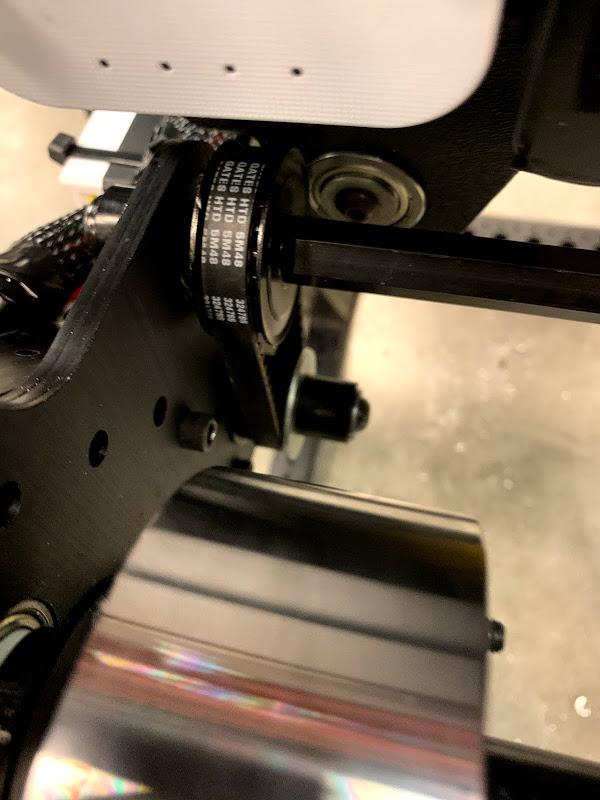
Today, a lot of minor or technical changes were made to the electronics, pneumatics, or trivial mechanical mechanisms on the robot. One of these is the shooter feeder wheel belt (pictured below).
Another such improvement is zipties around the CANbus connectors. That way, they should not come apart at all.
We have also made preparations to install the new bottom hood tomorrow afternoon.

Above: The v4 feeder hood and the shooter hood lay on the ground, disassembled. The regulator, pressure switch, and stored pressure gauge make a cameo in this shot, as they will get relocated to somewhere where the gauges are easier to read.
Field Set-up
Today, we set up the field in preparation for drivers’ and autonomous practice tomorrow.

Quote of the day: 60 rotations per minute, 60 rotations per second, same thing – Ritik Mishra, design lead, discussing the wheel of fortune mechanism